从数字智能
到物理智能
的范式跃迁
2026年AI与机器人技术发展趋势深度研究报告
技术突破
世界模型与NSP范式推动AI认知能力根本性跃迁,VLA统一架构打通感知-语言-动作闭环
产业应用
人形机器人从实验室走向工厂现场测试,全球工业机器人年安装量突破50万台
执行摘要
2026年标志着人工智能与机器人技术发展史上的关键转折点——从"数字智能"向"物理智能"的范式跃迁。这一转变不仅体现在技术架构的根本性创新,更反映在全球产业布局的深刻调整和政策治理框架的加速构建。
技术突破
Next-State Prediction(NSP)范式使AI首次具备物理因果推理能力,VLA统一架构打通感知-语言-动作闭环,人形机器人从实验室走向工厂现场测试
产业规模
全球工业机器人年安装量突破50万台,中国以57%市场份额主导人形机器人领域,AI医疗应用获FDA批准超1200项
治理框架
欧盟AI法案全面实施,全球治理框架加速构建,"负责任AI"成为企业竞争新维度,多智能体系统成为复杂任务的关键基础设施
技术突破与创新
从数字智能到物理智能的范式跃迁
世界模型与NSP范式
Next-State Prediction新范式
2026年标志着从"预测下一个词"(NTP)到"预测世界下一状态"(NSP)的核心跨越。这一转变由北京智源人工智能研究院首次系统阐述,AI系统不再仅仅处理离散符号序列,而是开始构建对物理世界底层规律的深度理解与因果建模能力。
技术突破
- • 多模态统一表征学习
- • 物理动态预测网络
- • 因果推理引擎
"你可以描述一个旋转的立方体,但你不理解旋转在空间中的含义"
— Yann LeCun,图灵奖得主
NTP vs NSP 范式对比
| 维度 | NTP范式(传统LLM) | NSP范式(世界模型) |
|---|---|---|
| 核心任务 | 预测离散符号序列的下一个元素 | 预测物理状态的演化动态 |
| 空间理解 | 符号性、离散化 | 连续性、度量性 |
| 因果推理 | 隐含、脆弱 | 显式、鲁棒 |
| 典型代表 | GPT-4, Claude, Llama | 悟界, V-JEPA 2, Genie 3 |
VLA统一架构革命
视觉-语言-动作(VLA)模型在2025-2026年经历了从学术概念到产业基础设施的关键跃迁,成为连接感知智能与物理智能的核心桥梁。NVIDIA于2026年1月CES发布的Isaac GR00T N1.6模型为VLA发展树立了新标杆。
技术突破点
异构本体适配
通过本体感知编码器统一处理不同自由度的机器人形态
时序扩散策略
将动作生成建模为去噪过程,实现平滑的多步运动规划
物理约束嵌入
在损失函数中显式编码关节限制、自碰撞避免等硬约束
主要VLA模型对比
| 模型/系统 | 发布机构 | 核心创新 | 数据规模 | 应用场景 |
|---|---|---|---|---|
| Isaac GR00T N1.6 | NVIDIA | 32层扩散Transformer | 数千小时跨本体遥操作 | 通用人形机器人控制 |
| pi-0.5 | Physical Intelligence | 开放世界泛化 | 未公开 | 家庭与商业服务机器人 |
| LingBot-VLA | 蚂蚁集团 | 双臂协调操作 | 20,000小时双手操作 | 仓储物流、精密装配 |
具身智能与物理AI系统

感知技术突破
机器人感知系统从"被动传感"向"主动感知"转变,神经感知模块广泛应用,结合多模态注意力融合、时序一致性建模与不确定性量化技术。

运动控制演进
深度强化学习在机器人协调控制中实现突破,多智能体强化学习(MARL)使中国制造业自动化车队实现自主协调,大幅减少人工操作需求。
物理AI系统架构
多智能体系统与自主协作
2026年AI Agent技术从个人助手向多智能体系统(MAS)跃迁,标志着智能形态从"软件"走向"社会化"的关键转折。复杂问题的解决依赖多智能体协同,MCP、A2A等通信协议的标准化使智能体间拥有了通用"语言"。
技术架构层次
基础通信层
MCP与A2A协议定义智能体发现、能力声明、任务协商的消息格式
中间件层
提供智能体注册、负载均衡、故障恢复、安全认证等公共服务
应用编排层
支持复杂工作流的声明式定义、动态分解与执行监控
主要协议与框架
| 协议/框架 | 主导机构 | 核心功能 | 成熟度 |
|---|---|---|---|
| MCP | Anthropic | 模型上下文标准化交换 | 2026年Q1发布1.0 |
| A2A | Google/开源社区 | 智能体间直接通信与协商 | 草案阶段 |
| LangGraph | LangChain | 状态机工作流编排 | 生产就绪 |
| CrewAI | 开源社区 | 角色扮演型多智能体团队 | 快速迭代中 |
产业应用与商业化
垂直领域的深度渗透与规模化应用
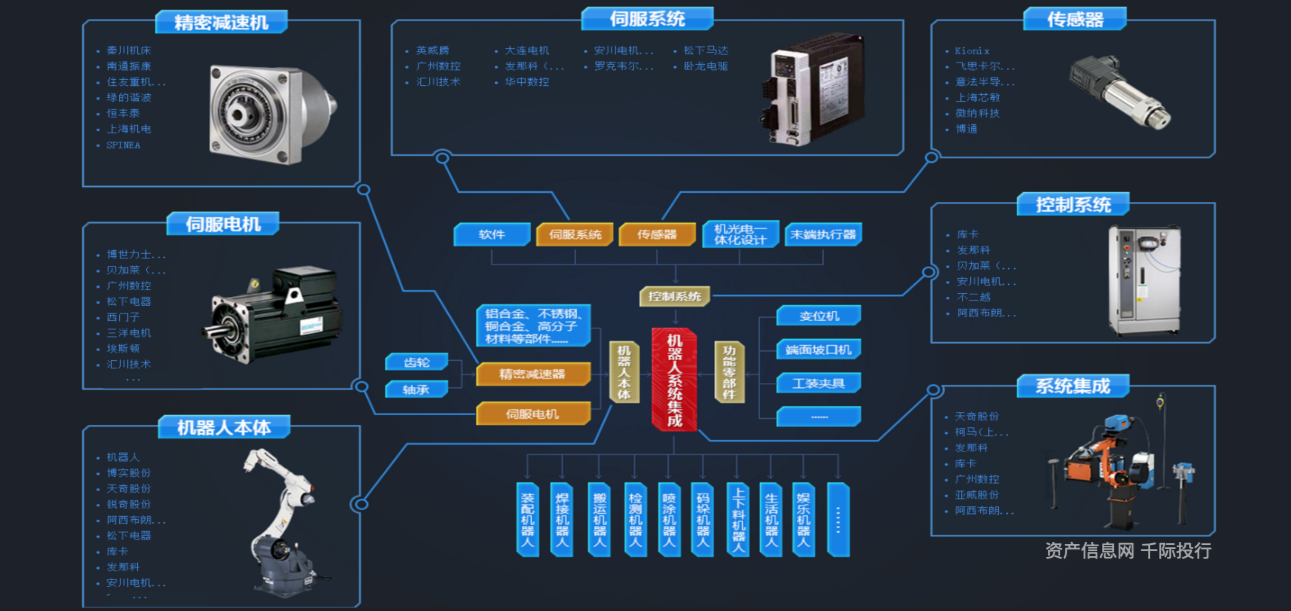
工业自动化与智能制造
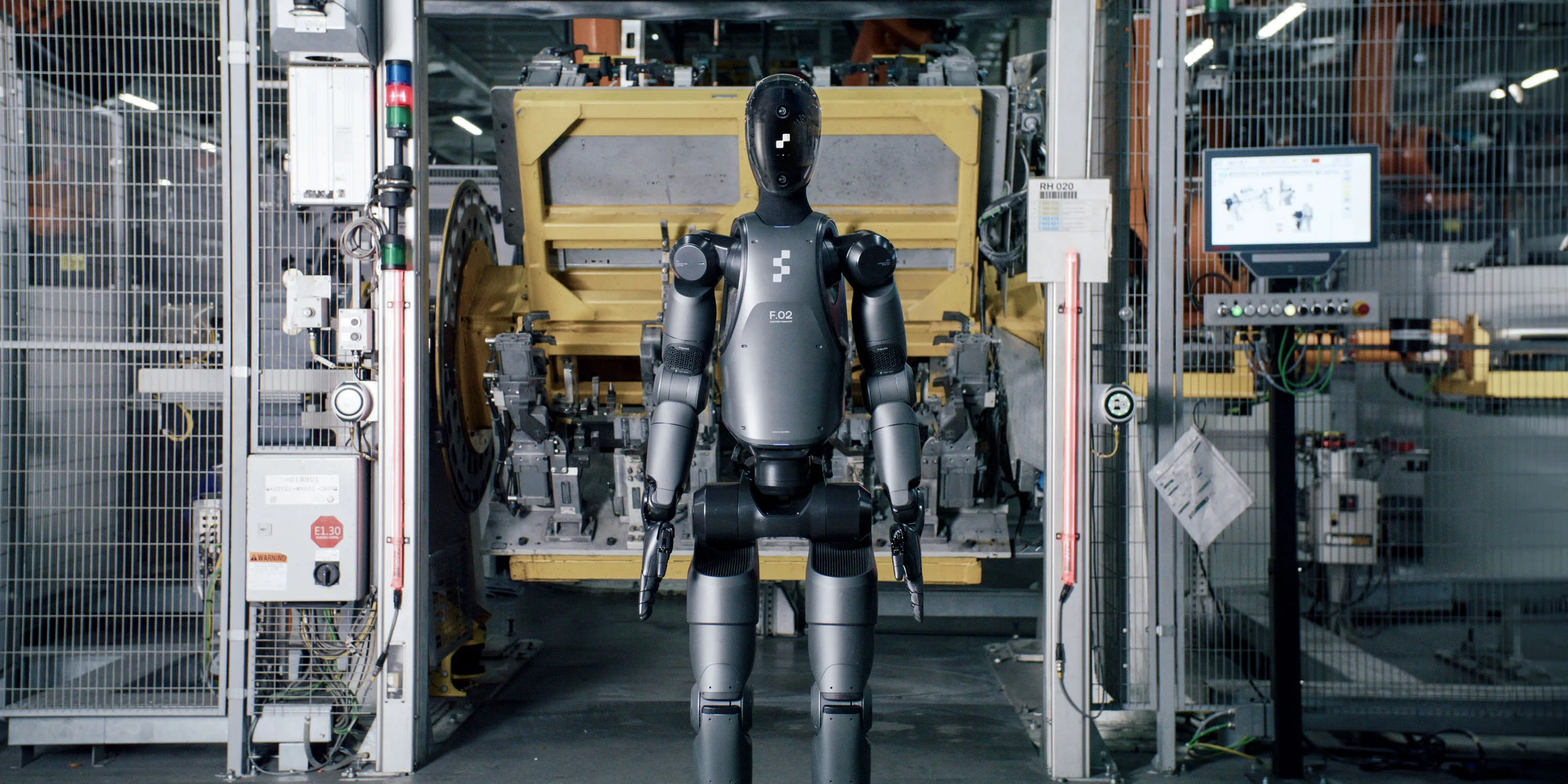
人形机器人产业化突破
里程碑事件
2026年1月4日,Boston Dynamics的Atlas机器人首次公开在Hyundai佐治亚州制造工厂进行现场测试,被业界视为物理AI商业化的里程碑。
技术配置与应用场景
主要应用场景
- • 零部件搬运与装配
- • 工具操作与使用
- • 质量检查与测试
主要人形机器人厂商对比(2026年)
| 厂商/产品 | 国家 | 2026年关键进展 | 目标场景 | 技术特点 |
|---|---|---|---|---|
| Boston Dynamics Atlas | 美国 | Hyundai工厂现场测试 | 汽车制造,重工业 | 液压驱动,动态运动 |
| Tesla Optimus Gen-3 | 美国 | Fremont工厂电池组装 | 汽车总装,物流 | 电驱动,大规模数据 |
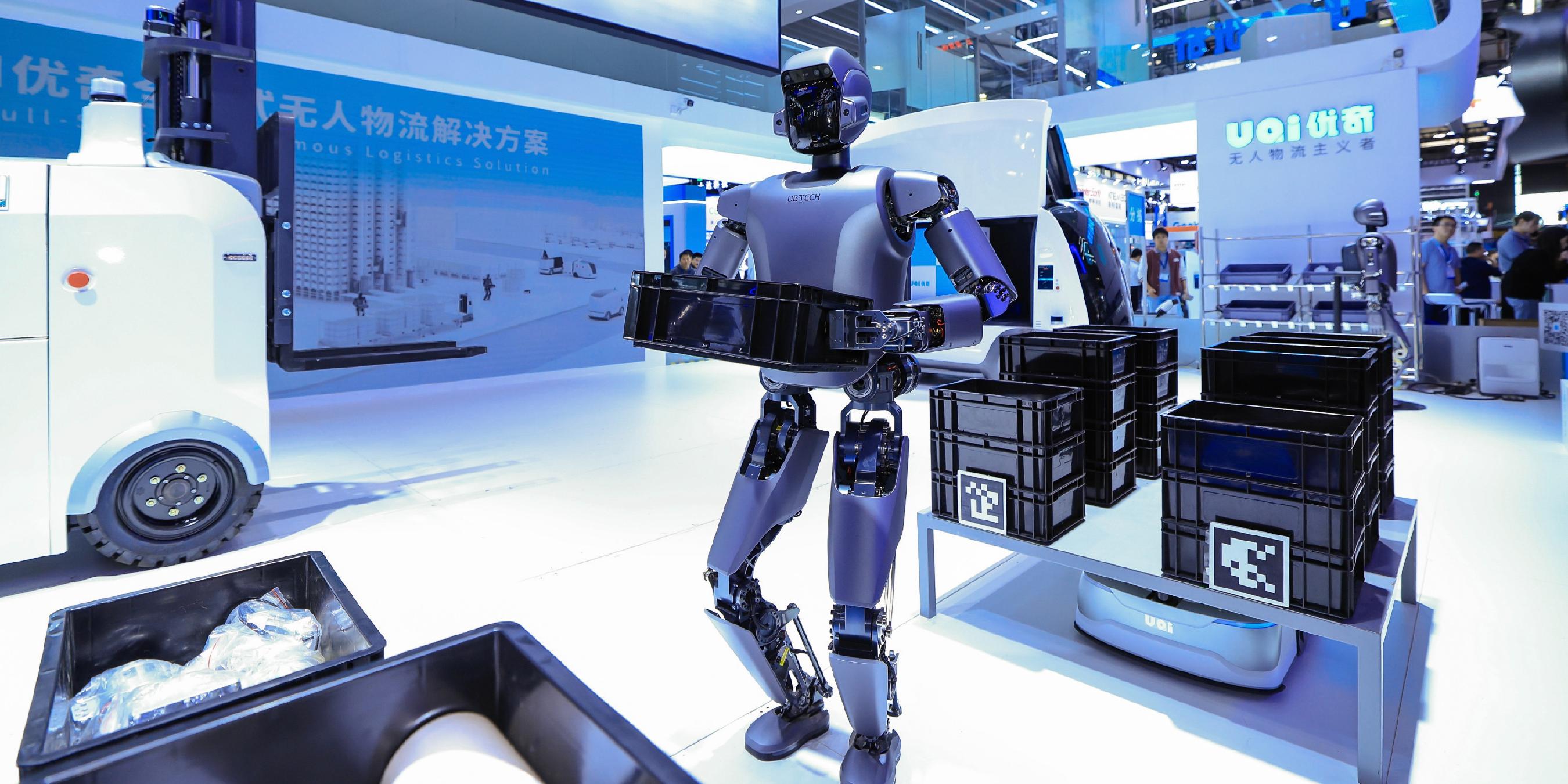
| 优必选 Walker S | 中国 | 比亚迪、蔚来等车企试用 | 汽车总装,服务 | 模块化设计,多场景适配 |
| 宇树科技 H1 | 中国 | 批量交付科研与商业客户 | 科研,教育,巡检 | 高性价比,开源生态 |
| 智元机器人 远征A1 | 中国 | 灵犀X1量产,工业场景验证 | 精密装配,实验室 | 灵巧操作,力控融合 |
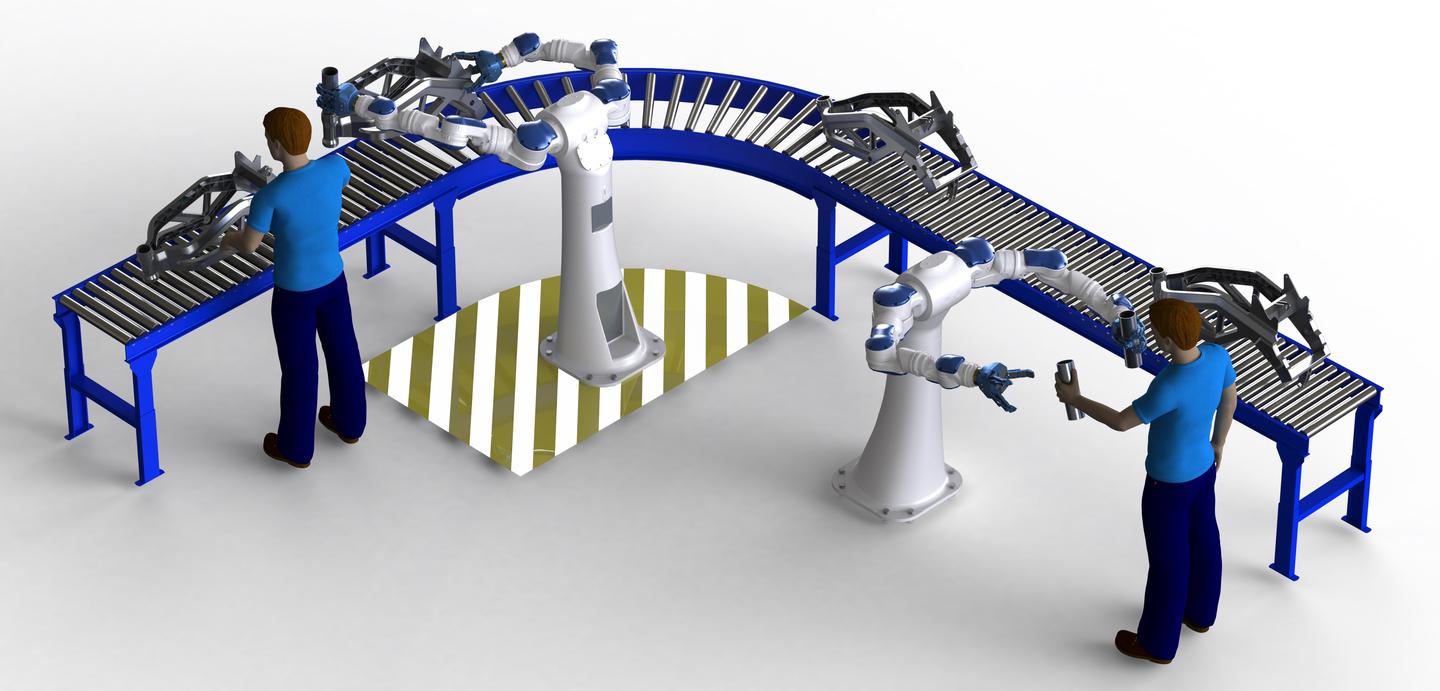
协作机器人普及:神经感知驱动的少样本学习
技术突破
新一代协作机器人通过视觉演示学习,操作员仅需执行3-5次任务示范,机器人即可提取关键技能并泛化至相似场景。
经济效益
小批量多品种生产的经济性显著提升,电子产线换型时间大幅缩短,支持柔性制造需求
医疗健康智能化
医学影像与诊断:AI渗透率的跨越式提升
成功案例:Viz.ai卒中检测系统
通过分析CT血管造影图像,自动识别大血管闭塞(LVO)——缺血性卒中最危急的亚型,并直接通知介入治疗团队。"时间即大脑"的价值主张建立了可持续的商业模式。
临床效益
- • 平均每例患者节省1小时响应时间
- • 显著提高卒中救治成功率
- • 建立可持续的商业订阅模式

技术对比
手术与康复机器人:精准化与智能化升级
天智航天玑系列
国产骨科手术机器人龙头,全球唯一可在同一设备上开展脊柱、关节、创伤三大领域手术的产品,定位精度<1mm,技术达国际先进水平< /strong>。
基层医疗突破
基层版经济型手术机器人单价降至100万元以下,适配县级医院需求,2025年基层医院装机量同比增长120%
智慧农业与食品生产
精准农业机器人

多光谱无人机与植被健康监测(NDVI)技术结合,使农民能够在作物出现可见症状之前识别压力区域,实现早期干预。
农业自动化舰队管理
空地协同架构
- • 自动驾驶拖拉机执行主要田间作业
- • 无人机进行快速巡田与变量施药
- • 多功能田间机器人处理特定任务
智慧物流与供应链
仓储自动化
Amazon全球运营中心机器人部署量
配送网络
无人机末端配送航程
供应链优化
需求预测准确度提升
供应链韧性:AI驱动的预测与优化
需求预测革命
深度学习模型同时分析市场趋势、社交媒体情绪、宏观经济指标等多元信息,预测准确度比传统方法高30%以上。
疫情期间表现
AI需求预测系统提前察觉口罩、民生用品需求暴增,帮助企业及时调整库存和物流配置

端到端可视性
整合供应商、生产、物流、销售全链条数据,实时识别潜在风险并触发预警与应急响应
市场规模与增长预测
全球机器人市场
人形机器人市场
投资趋势分析
政策与伦理
全球治理框架的加速构建
国际政策法规动态

欧盟AI法案(EU AI Act)
全球首个综合性AI监管框架
风险分级监管框架
GPAI特殊义务
具有"系统性风险"的模型(训练计算量超过10²⁵ FLOP)需进行模型评估、系统性风险缓解、事件报告等。
"监管俘获"担忧:大型厂商通过合规成本排挤小型竞争者,欧盟正在制定行为准则平衡安全与创新
美国AI治理策略

中国AI政策体系

伦理原则与治理实践
负责任AI核心原则
非歧视与算法公平
确保AI系统不因种族、性别、年龄等受保护特征产生系统性偏见
透明度与可解释性
使AI决策过程可被理解与审查,提供适当层次的解释
数据主权与隐私保护
尊重个人对其数据的控制权,保护隐私权益
人类监督与问责机制
确保关键决策保留人类判断与责任归属
安全性与可靠性
确保AI系统安全可靠,防止恶意利用和意外风险
社会责任与可持续发展
考虑AI对社会和环境的长期影响
企业伦理治理实践
数字伦理委员会
多元视角纳入,标准配置确保全面考量
算法审计与偏见检测
第三方审计、红队测试、影响评估常规实践
供应链责任传导
供应商伦理合规评估,全链条责任管理
全球治理合作机制
多边对话平台
跨境协调机制
数据流动与主权平衡
隐私计算、联邦学习、数据信托等技术方案,试图在保护隐私的同时释放数据价值
监管沙盒与创新友好治理
北京海淀区允许AI医疗产品在3家医院试运行,数据脱敏后豁免部分合规要求,实现"边试边管"
前沿趋势与未来展望
技术融合新方向与关键里程碑
技术融合新方向
量子计算与机器人
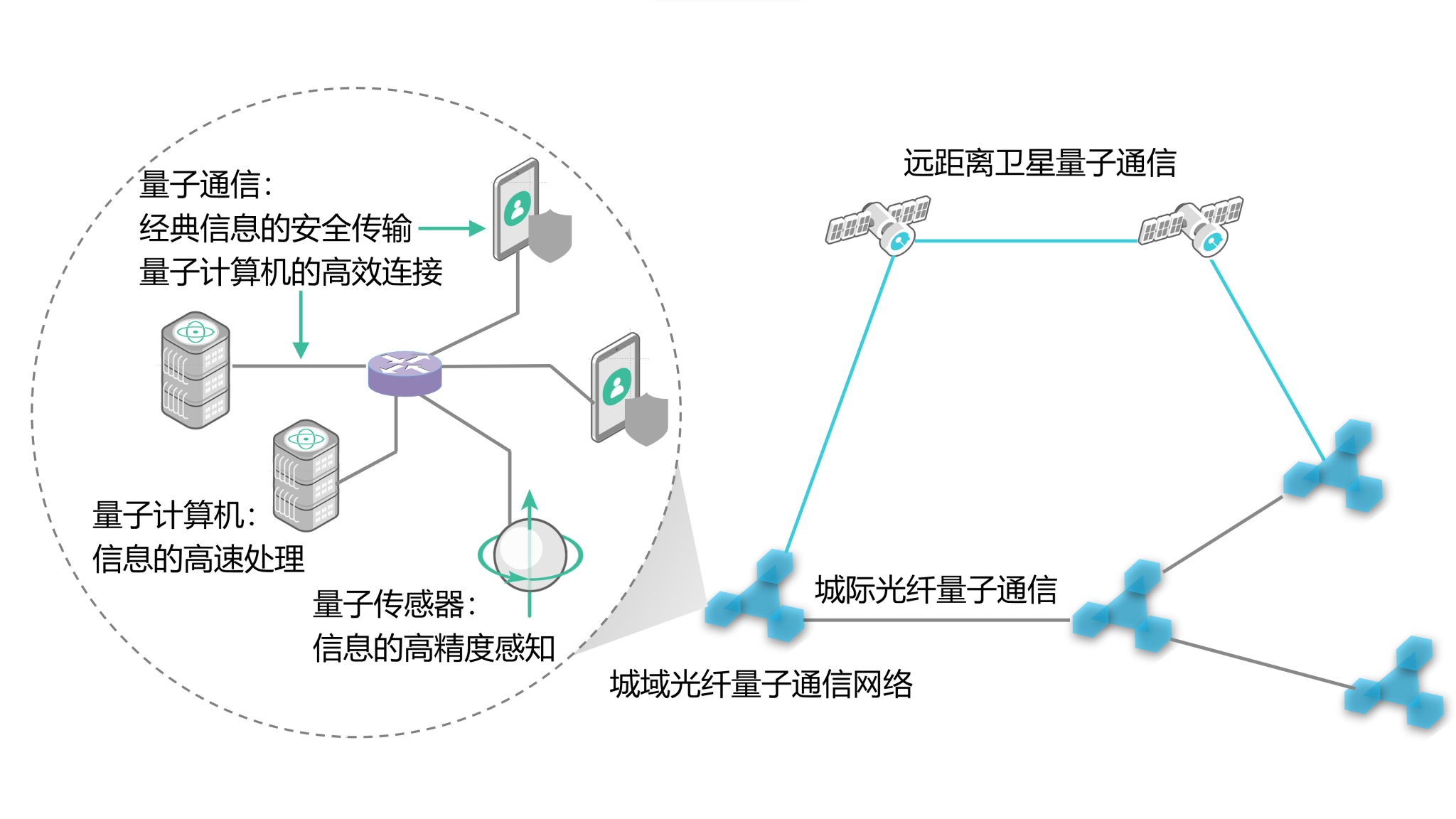
量子优化应用
量子退火器在路径规划中展现潜力,优于经典算法
量子增强感知
量子陀螺仪、磁力计等可达到超越经典极限的测量精度
生物技术交叉创新

生物混合机器人
利用活体细胞或组织作为驱动或感知元件,实现高能效比
脑机接口应用
直接读取神经信号,实现更自然的人机协作
2026年后关键里程碑
技术成熟度预测
人形机器人规模化商用
世界模型验证
AGI路径关键测试
当前世界模型主要在仿真环境验证,在开放物理世界中的泛化能力仍需检验
成功标志
支撑机器人在未经训练的新环境中快速适应与规划,显著加速通用机器人发展
产业生态演进
商业模式转型
RaaS模式兴起
Robot-as-a-Service降低初始投资门槛
平台化风险
主导平台可能形成市场支配地位
标准竞争
开源运动
促进技术普及和创新加速
专有标准
在性能优化和商业变现方面具有优势
总结展望
2026年作为AI与机器人技术发展的关键转折点,标志着从数字智能向物理智能的范式跃迁。世界模型与NSP范式的突破为AI赋予了物理因果推理能力,VLA统一架构打通了感知-语言-动作闭环,人形机器人从实验室走向工厂现场测试。在全球产业格局中,中国以57%的市场份额主导人形机器人领域,工业机器人年安装量突破50万台,AI医疗应用获FDA批准超1200项。政策与伦理层面,欧盟AI法案全面实施,全球治理框架加速构建,"负责任AI"成为企业竞争新维度。展望未来,技术融合新方向、商业模式转型和全球治理合作将成为关键发展趋势,推动AI与机器人技术向更加智能、安全、可持续的方向发展。
社会影响与风险管控
就业与劳动力转型
数字信任与公众接受
"伦理与信任已成为市场竞争的关键差异化要素"
关键风险红线
情感操纵风险
AI内容在实验环境中已达到与人类相当的说服能力,若被恶意利用可能威胁民主进程
责任归属问题
当AI自主决策导致意外时,需要明确的分层责任体系和专门的保险产品
基础设施依赖
能源、金融、交通等系统的AI化集中了风险,需要设计冗余机制与人工接管能力